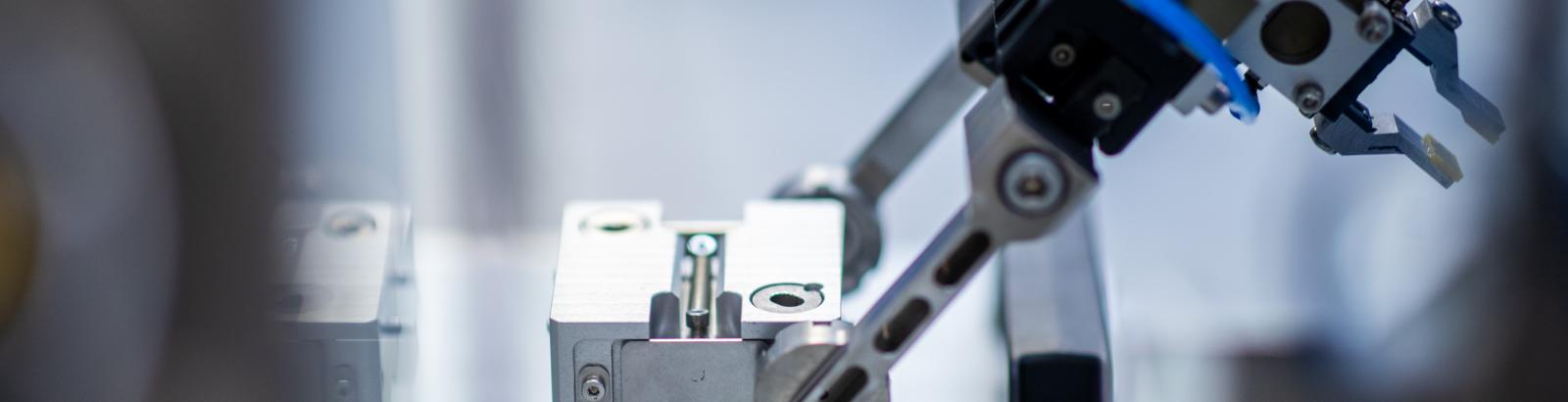
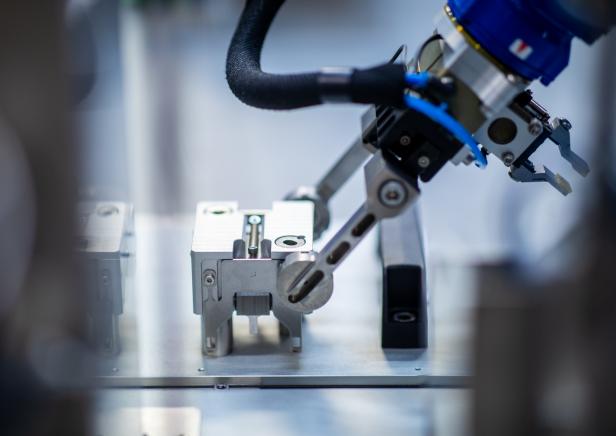
Dostarczamy różne w pełni zautomatyzowane cele do obróbki, które podnoszą wałki zębate z przenośnika i wkładają je do pojemnika do hartowania. W trakcie procesu hartowania pojemniki ulegają silnym odkształceniom. Aby włożyć wałek zębaty do pojemnika nie dotykając go, na głowicy robota umieściliśmy kamerę wraz z oświetleniem. Przy pomocy opracowanego przez nas przetwarzania obrazu możliwe staje się określenie pozycji otworów w wałku i w oparciu o nie umieszczenie wałka we właściwej pozycji i pod właściwym kątem w pojemniku.
Aby możliwe było wykrycie ewentualnego zderzenia z pojemnikiem, korzystamy z robota czułego na siłę.
System reguluje również doprowadzenie pojemników i podejmuje oczywiście wszystkie konieczne środki bezpieczeństwa podczas obsługi pojemników i wałków zębatych.
Inne kompetencje, z których korzysta to rozwiązanie
- Robotyzacja obróbki
- Dokładne systemy obróbki
- Przetwarzanie obrazów